
Cirurgia robótica do quadril

 O que é:
O que é:
O que é a cirurgia robótica e qual sua aplicação a prótese de quadril?
A cirurgia com auxílio robótica na artroplastia do quadril representam um avanço significativo na medicina ortopédica, unindo tecnologias de navegação e assistência robótica para aumentar a precisão, a segurança e os resultados funcionais dos pacientes.
Essa abordagem combina sistemas de imagem e software com robôs assistentes, permitindo uma colocação mais precisa dos componentes protéticos, menor variabilidade técnica e, possivelmente, melhores resultados clínicos.
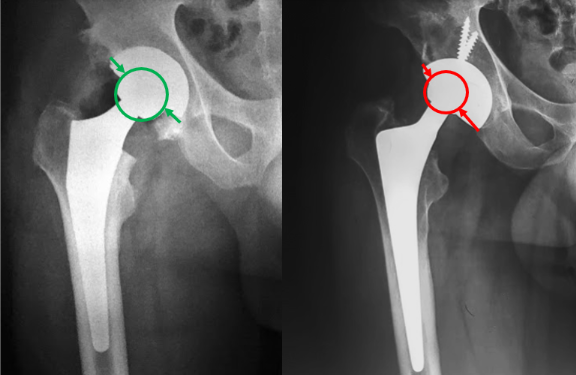
Esse tipo de intervenção está associado com a otimização do alinhamento dos componentes da prótese, fator muito importante para o sucesso a longo prazo da artroplastia de quadril.
Histórico e Evolução das Tecnologias Robóticas e Navegadas A utilização de tecnologia assistida na cirurgia ortopédica teve início nos anos 1980, com a introdução dos primeiros sistemas de navegação assistida por computador (CAS – Computer-Assisted Surgery).
A primeira aplicação prática foi observada em procedimentos ortopédicos e neurocirúrgicos. No caso específico da artroplastia de quadril, os sistemas de navegação ajudaram a fornecer uma orientação mais precisa para o cirurgião, mas ainda dependiam da habilidade manual.
Benefícios:
Nos anos 1990 e 2000, a tecnologia avançou com o desenvolvimento de sistemas mais sofisticados que integravam imagens tridimensionais intraoperatórias, melhorando o controle da localização dos implantes e permitindo simulações cirúrgicas.
Com o avanço dos robôs assistentes, a cirurgia robótica começou a ser explorada na ortopedia, resultando na criação de sistemas como o MAKO, entre outros, cada um com funcionalidades específicas para cirurgias de quadril e joelho.
Atualmente, a robótica e a navegação assistida são combinadas para maximizar a precisão e a eficácia da artroplastia de quadril.
Indicações
Esses sistemas permitem um planejamento pré-operatório detalhado e ajustes intraoperatórios, oferecendo ao cirurgião um controle mais rigoroso sobre o posicionamento do implante.
Resultados
Evidências Científicas e Principais Referências
Diversos estudos científicos destacam a eficácia da cirurgia robótica e navegada na artroplastia do quadril:
- Molina et al. (2019) demonstraram que a robótica assistida proporciona maior precisão no posicionamento dos implantes e melhor alinhamento dos componentes acetabulares, o que reduz o risco de complicações, como luxações e desgaste precoce.
- Redmond et al. (2016) realizaram uma análise sistemática da artroplastia de quadril assistida por robô, concluindo que o uso da tecnologia robótica resulta em menor variabilidade no posicionamento dos implantes e uma redução de erros cirúrgicos.
- Bohner et al. (2021) investigaram o impacto da tecnologia robótica e navegada na satisfação dos pacientes e relataram taxas mais altas de satisfação devido à redução da dor e recuperação funcional mais rápida.
- Fitzgerald et al. (2020) observaram que a precisão no alinhamento das próteses durante a artroplastia de quadril robótica navegada pode aumentar a longevidade do implante e reduzir a necessidade de revisões.
- Domb et al. (2019) mostraram que a artroplastia de quadril assistida por robô melhora a simetria dos membros e a mobilidade pós-operatória, principalmente em casos complexos e em pacientes com alterações anatômicas significativas.
Embora ainda existam desafios, a literatura científica apoia seu uso, especialmente em casos mais complexos e em pacientes com alto risco de complicações. Trata-se de uma ferramenta em constante evolução e aos poucos vai tendo seu uso ampliado no meio ortopédico.


{kind=link}